
Building a 4-Wheel Drive Robot
Learn how to assemble and program a basic four-wheel robot using Arduino.
Step 1: Components Needed
- 4 DC Motors
- Motor Driver Module (L298N)
- Arduino Uno
- Chassis with Wheels
- Battery Pack
- Jumper Wires


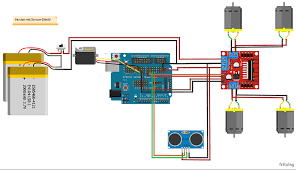
Step 2: Wiring
Connect the motors to the driver and the driver to the Arduino.
Step 3: Arduino Code
// Define motor driver pins
#define IN1 8
#define IN2 9
#define IN3 10
#define IN4 11
#define ENA 5 // Enable pin for motor A (connected to IN1, IN2)
#define ENB 6 // Enable pin for motor B (connected to IN3, IN4)
void setup() {
// Set motor driver pins as output
pinMode(IN1, OUTPUT);
pinMode(IN2, OUTPUT);
pinMode(IN3, OUTPUT);
pinMode(IN4, OUTPUT);
pinMode(ENA, OUTPUT); // Enable pin for motor A
pinMode(ENB, OUTPUT); // Enable pin for motor B
}
void loop() {
// Move Forward with 100% speed
analogWrite(ENA, 255); // Max speed for motor A
analogWrite(ENB, 255); // Max speed for motor B
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
digitalWrite(IN3, HIGH);
digitalWrite(IN4, LOW);
delay(1000); // Move forward for 1 second
// Stop
analogWrite(ENA, 0); // Stop motor A
analogWrite(ENB, 0); // Stop motor B
delay(500); // Stop for 0.5 second
// Move Backward with 50% speed
analogWrite(ENA, 128); // 50% speed for motor A
analogWrite(ENB, 128); // 50% speed for motor B
digitalWrite(IN1, LOW);
digitalWrite(IN2, HIGH);
digitalWrite(IN3, LOW);
digitalWrite(IN4, HIGH);
delay(1000); // Move backward for 1 second
// Stop
analogWrite(ENA, 0); // Stop motor A
analogWrite(ENB, 0); // Stop motor B
delay(500); // Stop for 0.5 second
}
Step 4: Test and Run
Upload the code and see your robot move forward and backward in a loop.
